Lazerarc Blog
Why Choose Robotic Part Positioners
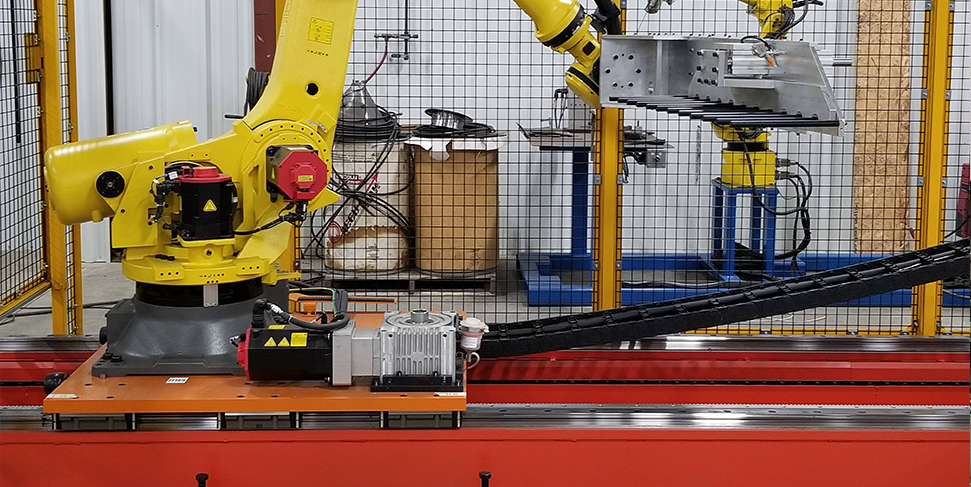
Robotic Part Positioners play a pivotal role in granting 360° access to tooling when a robot exceeds it rotational limits. By managing the rotation of parts, these positioners enable the robot to achieve complete access to workpieces situated beyond its inherent range of motion. This capability enhances the robot flexibility and ensures comprehensive coverage in handling diverse tasks and workpiece orientation.
Robotic positioners offer the advantage of minimizing the footprint of the robotic workcell. Positioners are inherently compact and designed for efficiency. They occupy less space compared to conventional workbenches or other types of workstations. Industries across the board are integrating multiple-axis positioners to diminish the spatial requirements for processing and accessing parts. Simultaneously, this minimizes the need for manual part handling. This becomes particularly advantageous in the manipulation of sizable components like aircraft wings or rail cars, where precise flipping for welding or painting on multiple sides is essential. Multi-axis robot positioners eliminate the need for outdated and expensive cranes and jigs, facilitating a more cost-effective and efficient process.
Some robotic positioners are equipped with impressive payload capacities. The Lazerarc Skyhook Positioner capacity can support payloads exceeding over 1,000 kg. This substantial payload capacity not only accommodates larger and heavier workpieces but also contributes to the versatility and robustness of the automation system. It enables the handling of substantial loads, expanding the range of applications and industries where they can be effectively applied.
Part positioners offer the valuable feature of adding multi-stations, enhancing flexibility in the production processes. This enables production staff to load parts concurrently with the robot working on another piece, effectively minimizing downtime. As one part completes its processing, the positioner smoothly rotates the next part in the robot’s work area, ensuring a seamless and continuous workflow. This not only optimizes efficiency but also contributes to overall productivity.
This capacity to manage multiple parts simultaneously translates into a substantial increase in throughput, leading to faster cycle times and increased productivity. This seamless transition from one part to the next is facilitated by having the next component preloaded on the positioner. This approach minimizes the time gap between workpieces, effectively reducing the idle periods, resulting in an overall enhancement in efficiency and productivity within the production process.
See how we can help you