Lazerarc Blog
Linear Transfer Systems Machine Components
A linear transfer system enables diverse function in any production process. As there are a great amount of components attachable to them as well as great control over the system itself. The core of a linear transfer system, such as a Robot Transfer Unit (RTU), is its driving mechanism, guides and bearings, and its controls. A table is an additional component that can be used for a mounting of a robot, or a material feeding bin. Designs for RTUs in automation are heavy duty and require great precision, the resultant is system and components that are fabricated to achieve such requirements.
The following are engineering design factors that relate directly to linear transfer unit functionality and durability. Lazerarc engineers take into account a wide range of factors including loads imposed by the moving weight of tables, robots and transferred parts as well as acceleration and deceleration loads, environmental factors such as dust, debris or machine chips that can degrade system life and intended design life of the system.
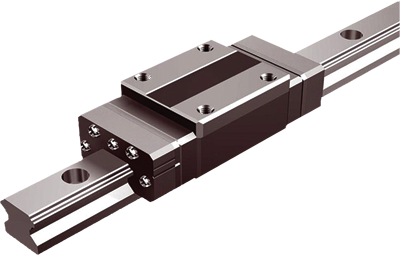
Guides & Bearings
Linear Guides and Bearings are an integral part to a linear transfer system such as an RTU as it is the component that slides down the track while also fastening whatever the required load is to the track. The key to RTU accuracy resides in these linear guides, and is dependent on the weight of the load, the rate at which the load needs to be operating at, the center of mass, the presence of any change in elevation or tilt, and the overall wear and life expectancy for the guide. To properly size the required guide an accurate assessment of all the above stated factors is crucial. An undersized bearing or guide may result in failure and decreased performance, whereas an oversized design can decrease performance and unnecessarily increase expense. RTUs can be set up in a manner that allows adjustment in track size, by removal of individual pieces. This will increase complexity as bearings are very particular to alignment to operate at their maximum efficiency, such that a different way of grounding bearings is implemented to be able to allow for such changes.
Drive System Options
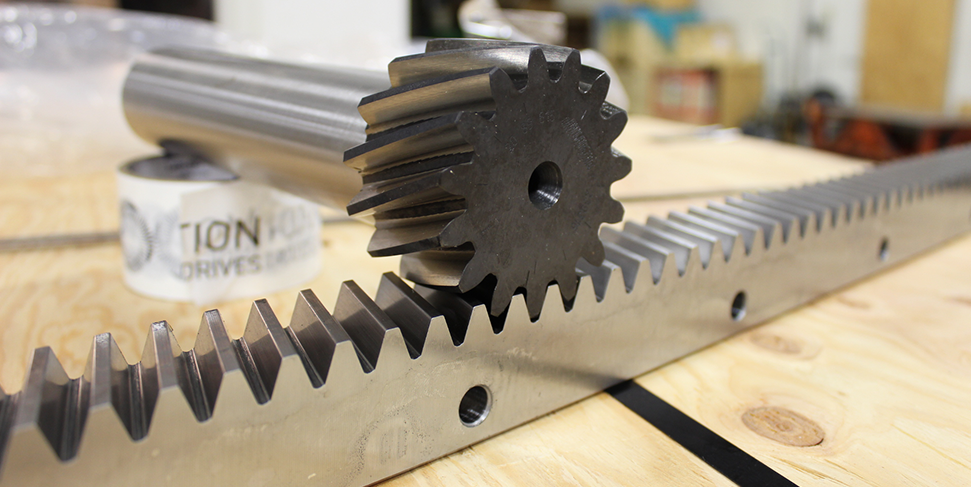
Drive system options include mechanisms such as Belts, Ball Screws, Pneumatics, Hydraulics, Linear Motors, and Helical Rack and Pinion sets. All of which have their purposes but for multi-use at multiple locations, in great loads with great accuracy, the Helical Rack and Pinion sets are the best to use.
System Motors
As the rack and pinion drive system is the most common for production processes, we will be talking about the motor relative to that driving system. The motor is attached to a pinion, and the rack is along the track of the RTU. The motor using an encoder counts revolutions, including partials up to the tolerance the encoder is specced out to be. Using the encoder the motor then acts as a pseudo-servo motor where exact linear translation is known based on the rotations of the motor and pinion.
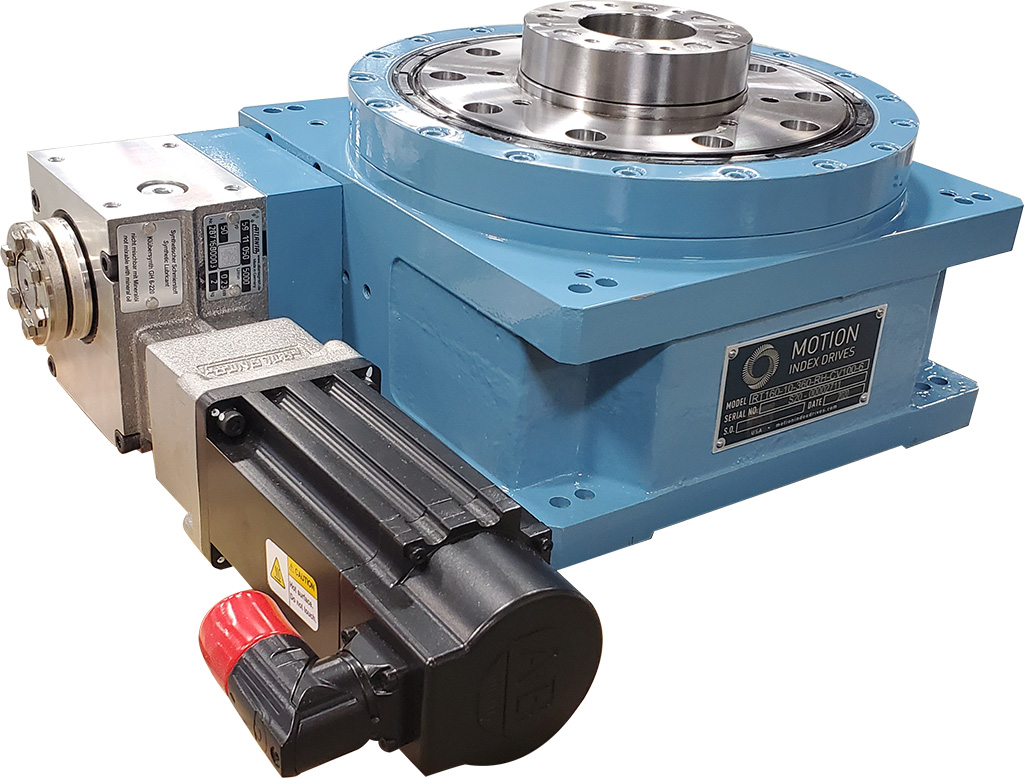
Rotary Indexing Tables
The table is the next important component of an Robot Transfer Unit system. It is what is attached to the linear guides and bearings and also determines what can be attached to it. In an RTU system it would typically be a 6 axis robot used on production lines. For other similar linear transfer systems it could include feeder bins for materials that are required on the assembly. Another example are Tool Tray Transfer Units which deliver the tool required by a robot on the line. Each table attachment has its own accuracy and needs to be calibrated as such. Some systems would include guide rails along with the rack-and-pinion assembly to maximize accuracy. Universal tables and trays can be used as a means to be able to cycle the purpose of the system and allow for more versatile use of the workspace.
Cable Management Systems
An RTU would require cable components running from controls and power to the moving tray. As it is a linear transfer system it is implied that those cables need to extend and retract repetitively. Due to that cable management systems are implemented as a means to control the intake and output of cable from the system to ensure that it does not get tangled, ensnared, or cause problems within the system. Depending on the system and safety requirements a cable carrier may be required to ensure proper functionality of the system. Cable systems undergo repetitive flex stresses and need to have a flexure design life commensurate with the overall design life of the system.

Controls
Controls for the system would be similar to that of programming the robot for a given task. The designed linear motion is coded and repeated, in conjunction with the robots tasks at each linear location. This is often done through direct control with a programmable logic controller, or designed in as variable frequency drives (VFD) in a control panel. VFDs have an added benefit of increasing motor-output efficiency and therefore transfer performance as a whole. Depending on the motor used to drive the pinion there are various controls that would be required, whether it is a DC, Stepper, Servo etc.
See how we can help you